Incremental Encoder

This extension is for incremental quadrature encoders. Such encoders are used to detect motor movements as well as some knobs. It can detect direction, relative position, and speed.
Such encoders can operate using mechanical, optical, or magnetic (hall effect) sensors. The above image shows a rotary knob (mechanical) and a motor sensor (hall effect). While their working principles may differ, the wiring and code is the same.
Pins
This extension isn't for any specific model of encoder, but most incremental quadrature encoders will have the following pins.
| Pin | Description |
|---|---|
| VIN / V+ | Power for the sensor. Connect to 3V3. |
| GND | Ground pin. Connect to the GND pin on the ESP32. |
| A / CLK | Channel A of the encoder. |
| B / DT | Channel B of the encoder. |
Some rotary encoders for knobs will come with an additional SW pin for the built-in switch.
Wiring
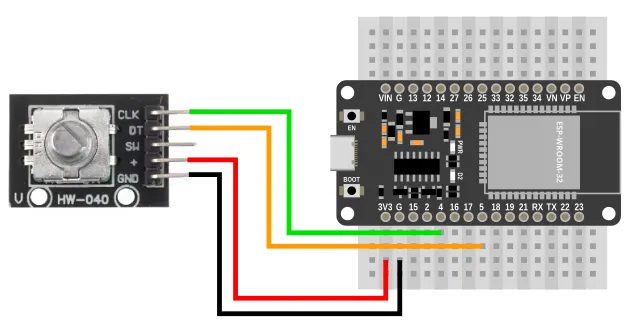
As there are many different types of incremental quadrature encoders, your wiring may differ.
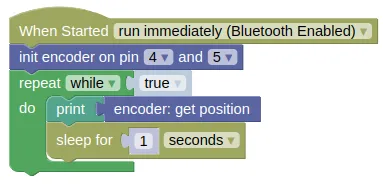
Code
This code will print the position.
Blocks
Python
import encoder
import time
encoder_device = encoder.Encoder(4, 5)
while True:
print(encoder_device.position())
time.sleep(1)
Results
You should see the temperature readings printed in the monitor.
class Encoder - read incremental quadrature encoders
Constructors
encoder.Encoder(pin_x, pin_y, scale=1, min_speed=5)
Creates an Encoder object.
The arguments are:
-
pin_xAn integer representing the pin connected to the first encoder channel. -
pin_yAn integer representing the pin connected to the second encoder channel. -
scaleA number representing the scaling factor for position (ie. If set to 2, then every 1 steps on the encoder will result in a 2 steps change in position). Does not affect speed readings. You should usually leave this as 1. -
min_speedA number representing the minimum speed. If the measure speed is lower than this, a speed of 0 will be returned.
Returns an Encoder object.
Methods
Encoder.position(value=None)
Get or set the encoder position.
The arguments are:
valueIf not None, this will set the current encoder position to the provided value.
Returns a number representing the encoder position if value is None or not provided, else returns None.
Encoder.speed()
Get the encoder speed.
Returns a number representing the encoder speed.