Laser Ranging (VL53L0X, VL52L1X)

The VL53L0X (2m range) and VL53L1X (4m range) are Time-of-Flight (ToF) laser ranging module. They are much smaller than ultrasonic distance sensors, are less prone to interference from multiple sensors, and have a narrower detection cone.
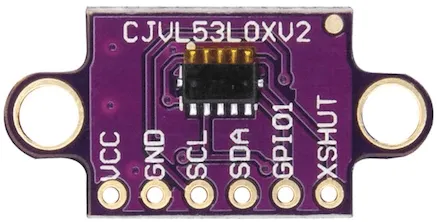
Pins
| Pin | Description |
|---|---|
| VCC | Power for the sensor. Connect to 3V3. |
| GND | Ground pin. This should be connected to the GND pin on the ESP32. |
| SCL | Serial Clock. This is used to communicate with the ESP32 using the I2C protocol (default pin 18). |
| SDA | Serial Data. This is used to communicate with the ESP32 using the I2C protocol (default pin 19). |
| GPI01 / XSHUT | Not in use. Leave unconnected. |
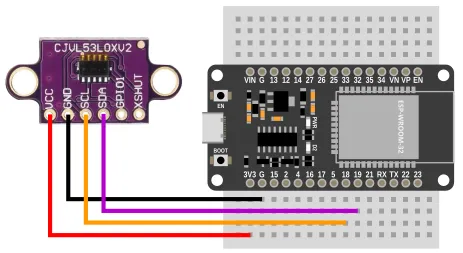
Wiring
Code
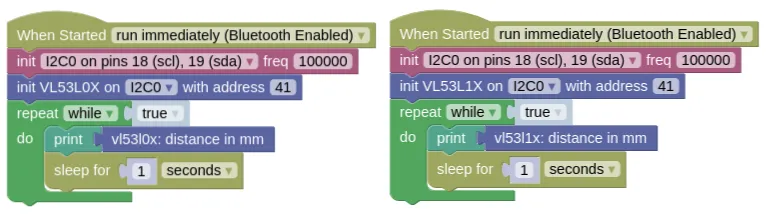
This code will print the measured distance every second.
Blocks
Python
VL53L0X
import machine
import vl53l0x
import time
i2c0 = machine.I2C(0, freq=100000)
vl53l0x_device = vl53l0x.VL53L0X(i2c0, addr=41)
vl53l0x_device.start()
while True:
print(vl53l0x_device.read())
time.sleep(1)
VL53L1X
import machine
import vl53l1x
import time
i2c0 = machine.I2C(0, freq=100000)
vl53l1x_device = vl53l1x.VL53L1X(i2c0, addr=41)
vl53l1x_device.start()
while True:
print(vl53l1x_device.read())
time.sleep(1)
Results
You should see the distance (...in mm) printed in the monitor. Move your hands in front of the sensor and you should see the printed distance change.
class VL53L0X / class VL53L1X - control VL53L0X / VL53L1X laser ranging sensor
Constructors
vl53l0x.VL53L0X(i2c, addr=0x29)
Creates an VL53L0X object.
The arguments are:
-
i2cAn i2c object. -
addrThe i2c address of the VL53L0X. By default, this should be 41 (0x29).
Returns a VL53L0X object.
vl53l1x.VL53L1X(i2c, addr=0x29)
Creates an VL53L1X object.
The arguments are:
-
i2cAn i2c object. -
addrThe i2c address of the VL53L1X. By default, this should be 41 (0x29).
Returns a VL53L1X object.
Methods
VL53L0X.start() / VL53L1X.start()
Starts the sensor. You must run this before taking any readings.
Returns None
VL53L0X.stop() / VL53L1X.stop()
Stops the sensor. If you don't need to use the sensor, you can stop it to save some power.
Returns None
VL53L0X.read() / VL53L1X.read()
Reads the sensor value.
Returns an integer representing the distance in mm.
VL53L1X.set_distance_mode_short()
Set the distance mode to short. In this mode, the sensor is less affected by ambient light, but maximum range is limited to around 1.3m.
Returns None
VL53L1X.set_distance_mode_long()
Set the distance mode to long. In this mode, the sensor is capable of up to 4m range, but is more prone to interference by ambient light.
Returns None