Servo Driver (PCA9685)
While we can control servos using the IO pins, there are a some problems with that approach...
- Requires one pin for each servo
- Wiring can be a hassle if you need to provide separate power for the servo
One way to work around these limitations is to use the PCA9685 servo driver board.
Benefits of this board are...
- Uses the I2C communication protocol; only requires 2 pins and multiple I2C devices can share the same pins.
- Each PCA9685 board can control up to 16 servos, and you can use up to 62 of these boards simultaneously (...for 992 servos total).
- Simplified wiring.
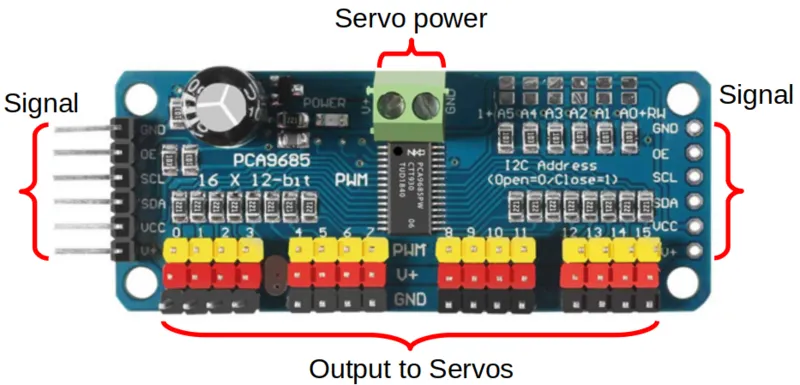
Pins
| Pin | Description |
|---|---|
| Servo Power Screw Terminals | Power supply for the Servos Only. Most servos max out at 7.2V so you should not exceed that. |
| Output to Servos | 16 outputs for servos. You can use as many or as little as you need, but make sure you match the color on the servo wires. |
| GND (Signal) | Ground pin. This should be connected to the GND pin on the ESP32. This is the same as the GND pin on the screw terminals. |
| OE (Signal) | Output Enable pin. If given a HIGH (3.3V or 5V) signal, it will disable all the outputs. You can leave this disconnected if you're not using it. |
| SCL (Signal) | Serial Clock. This is used to communicate with the ESP32 using the I2C protocol (default pin 18). |
| SDA (Signal) | Serial Data. This is used to communicate with the ESP32 using the I2C protocol (default pin 19). |
| VCC (Signal) | Provides the PCA9685 with power. This does not provide power to the servo. Connect to 3V3 on the ESP32. |
| V+ (Signal) | Power supply for the Servos Only. This is the same as the V+ pin on the screw terminals, and you only need to connect one of them. |
| Signal pins on right side | Identical to the pins on the left side. Useful to chain multiple PCA9685 boards together, but should otherwise leave them alone. |
Power
The PCA9685 board has TWO power supply. The V+ pins only supply power to the servos, and does not power the chips on the board. The VCC pin only supply power to the board, and does not power the servos. Both pins must be powered for the board to work.
For testing purposes, you can connect the VIN pin on the EPS32 to the V+ pin on the PCA9685. The VIN pin cannot supply much current, so this will only work with a few lightly loaded servos.
To provide sufficient power to the servos, you should use either...
- A separate battery pack supplying at most 7.2V (eg. 2 x 18650 batteries).
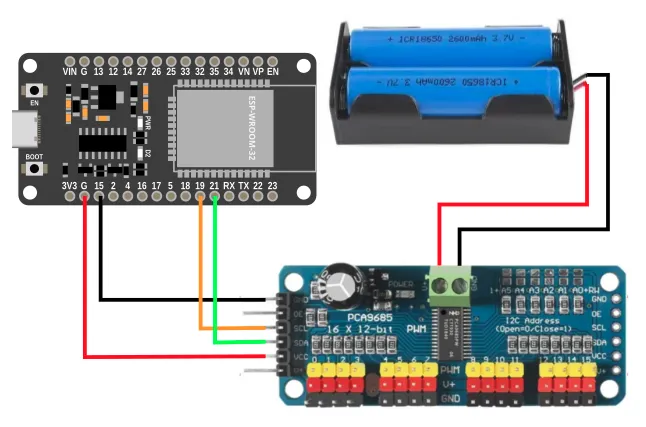
...or if your battery pack is higher than 7.2V (eg. 12V)...
- A voltage regulator to reduce the higher voltage down to 7.2V.
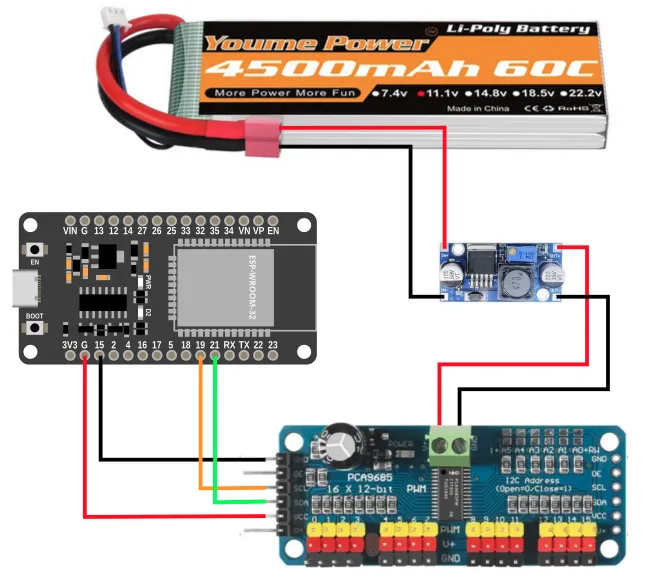
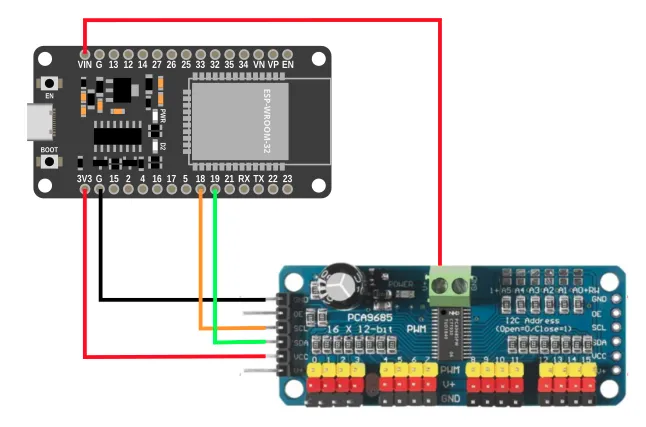
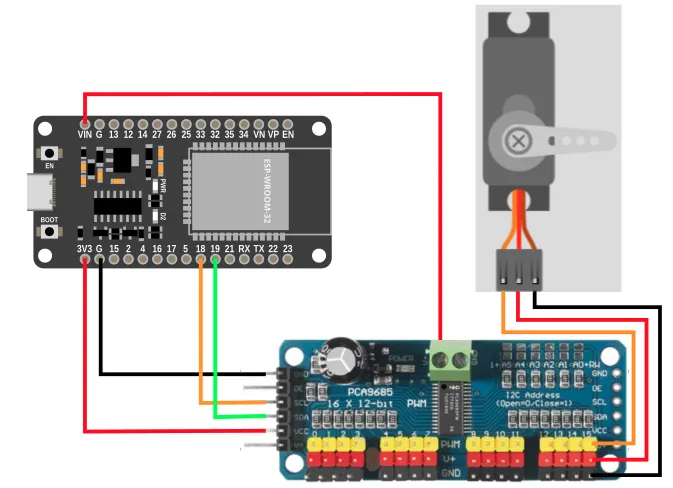
Wiring
The example below uses power from VIN. Modify accordingly if you are using a different power source for the servos.
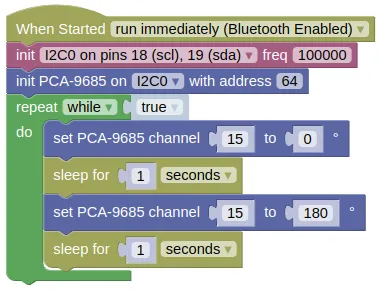
Code
This code will change the angle for servo on channel 15, from 0 to 180 degrees and back.
Blocks
Python
import machine
import pca9685
import time
i2c0 = machine.I2C(0, freq=100000)
pca9685_device = pca9685.PCA9685(i2c0, 64)
while True:
pca9685_device.servo_deg(15, 0)
time.sleep(1)
pca9685_device.servo_deg(15, 180)
time.sleep(1)
Results
You should see the servo turn from 0 to 180 degrees and back. Depending on the model of your servo, you may find it turning less or more than 180 degrees; different servo models interpretes the servo command signal differently.
class PCA9685 - control PCA9685 servo driver
Constructors
pca9685.PCA9685(i2c, addr=64)
Create a PCA9685 object.
The arguments are:
-
i2cAn i2c object. -
addrThe i2c address of the gyro. By default, this should be 64.
Returns an PCA9685 object.
Methods
PCA9685.set_frequency(freq)
Sets the PWM frequency for the PCA9685. Most RC servos works at 50Hz.
The arguments are:
freqA number specifying the frequency in Hz.
Returns None.
PCA9685.pwm(channel, duty)
Sets the PWM duty cycle for the specified channel. This can be useful when using the PCA9685 to control LED or brushed motors (...not servo motors).
The arguments are:
-
channelAn integer specifying the channel (0 to 15) -
dutyA number representing the duty cycle (0 to 4095).
Returns None.
PCA9685.servo_us(channel, us)
Sets the pulse width for the specified channel. When controlling servos, you would typically use values ranging from 500us to 2500us.
The arguments are:
-
channelAn integer specifying the channel (0 to 15) -
usA number representing the pulse width in microseconds (us).
Returns None.
PCA9685.servo_deg(channel, deg)
Sets the angle for the servo on the specified channel. The output PWM width will range from 1000us (0 deg) to 2000us (180 deg).
Depending on the model of your servo, you may find it turning less or more than 180 degrees; different servo models interpretes the servo command signal differently.
The arguments are:
-
channelAn integer specifying the channel (0 to 15) -
usA number representing the angle in degrees.
Returns None.